
To wrap up our trio of NASA challenges these past few months, the GrabCAD Community hosted a NASA challenge that asked participants to design a flexible, but load-bearing floor for use in both microgravity and gravity. The design will be used as part of a docking system that can articulate how to dock elements that are not perfectly aligned.
In this past year alone, NASA has challenged the GrabCAD community to design rovers, transonic tunnels, starshades, and even thermal protection shields for spacecraft; the community did not disappoint.
We want to thank everyone who participated in this challenge sponsored by The Center for Design and Space Architecture (CDSA), which is NASA Johnson Space Center’s design studio for human-centered design, concept development, and rapid prototyping of human spaceflight architectures. The CDSA team uses sketches, engineering analysis, CAD modeling, virtual reality, and physical mockups to create options for human exploration of the inner solar system.
Below are the winners:
NASA Challenge Winners
First Place
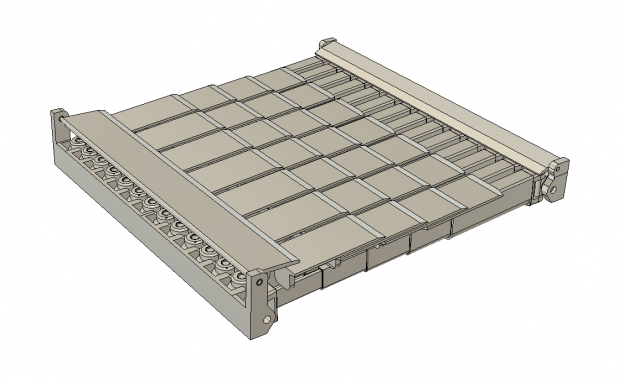
SlideGrid by nazarii.vareshchuk-1
“This design features simpler geometries and utilizes telescoping beams as the primary mechanism. The system shines in the attention to detail. The beams are alternating to reduce gaps and there are internal and external mechanisms to the beam to aid in centering and reliability of the system. Overall, it is an excellent, very well-thought-out design and the strongest of the floor concepts developed. It fulfills all requirements and is readily usable as intended. The system appears relatively comfortable to use and generally satisfies MGAAMA needs. The overall system appears to be robust. Multiple mechanisms are in place to ensure the reliability and robustness of this system. The basic components appear straightforward to manufacture with CNC or other techniques and the system should function for years without crew maintenance intervention. The beams appear to be modular, allowing them to be removed for maintenance and repair. The beams themselves have internal mechanisms that appear to be serviceable. Stress analysis shows that this system should be strong enough to withstand expected loads. The folding transport configuration proposed is very beneficial for the 40x40 by 40x40 MGAAMA used by the pressurized rovers. There are a few lips and potential pinch points, but the density of the beams reduces this considerably. It is regrettable that the gaps between beams are not completely eliminated, but they are sufficiently small that they should not interfere with translation of wheeled or walking crew, robots, or equipment. Additionally, a covering would eliminate this issue as was mentioned in the text. A 'fish-scale' covering is mentioned and would benefit this design; however, it was not implemented in the final design. The gaps are held to a minimal distance, allowing only very small objects to fall through. There is a risk of objects smaller in width than 3/4 inch to fall through. The rectangular sliders may increase wear on wheels as compared with circular sliders, but the alternating orientation of these sliders minimizes the gap between sliders, thus reducing the potential for wheels to get stuck between sliders. The complexity of all the mechanisms in this system could reduce overall reliability with multiple small issues. The sliders appear resilient to damage, but if the floor assembly needs to be removed it does look like a somewhat involved process.”
Second Place
FLEXIBLE FLOOR WITH SLIDER PIPE by muhammad.fikri-28

“This design takes influence from an existing technology and transforms it for this use case. The telescoping rods offer great flexibility for the system and introduces a level of modularity and maintainability. The rods appear to be easily replaceable if issues arise. Walking on this floor will be fairly easy. The circular cross section of the sliders will make walking in thin soled shoes or socks more comfortable than sliders with sharp edges. This flooring concept appears almost comfortable, as if the crew could relax sitting or lying down on it in their off-duty time - it looks almost like a massager. The rounded shape of the sliders reduces the potential for injury. The construction appears reasonably simple and would allow the floor to be disassembled for inspection, repair, etc. However, it would be annoying to have to disassemble the entire structure to retrieve fallen items. It would be better if it were possible to remove smaller groups of sliders at a time - a large enough number to be able to reach down and work under the floor. The design appears very robust and should have a long usable lifetime. The analysis suggests the design will be sufficient for expected loads. The slider design does result in an intermittent, decreasing radius in slider in one direction only. Thus, it is possible that wheeled objects traveling in the direction of increasing radius might have a wheel fall into the gap and become stuck as it is pushed/pulled forward. However, either a double wheel or a wheel of sufficient thickness should eliminate this risk. The gaps between the slider pipes are a definite weakness that would require mitigation before a system like this could be used, but the circular cross section of the sliders offers significant advantages that are worthy of further study. This weakness is also somewhat mitigated by the fact that the sliders are oriented in the direction of travel instead of perpendicular. This will reduce the number of "traps" that can catch wheels and other small, protruding objects. The use of round instead of rectangular sliders will also reduce potential points of discomfort when physically interacting with the sliders. Nonetheless, a means to cover the gaps in the floor would be highly desirable.”
Third Place
Flexible but Load-Bearing Floor by podroykin.igor-1

“This is a simple and effective design. It is noteworthy that this concept exceeded design requirements for articulation in pitch and yaw. This gives much flexibility with stretching the floor and yaw angles. Roll and pitch angles are not clearly defined and may be less flexible. The bar grates also seem to be removable leading to easy access for maintenance procedures. The design is modular and has easily replaceable components. Reliability seems high with this system. The bar grating appears to be removable for maintenance. This also provides access to the lower control arms. All components appear relatively straightforward to manufacture. Most components could be fabricated via CNC machining or 3D printing, with some design tweaks in mind. Some bearings and joints would be more difficult to fabricate. The structure is simple, with few moving parts and should be very reliable for a long time. The spacing between the slats is the greatest liability of this system. This is a function of placing the slats perpendicular to the direction of travel instead of parallel. Yaw offsets cause the gaps on one side to decrease while on the other they increase. This forces more spacing between slats than if the slats are parallel to direction of travel. Changes in length also increase the spacing. The spacing between slats will make walking mildly annoying but easily manageable. But because the gaps between slats are greater than the width of the slats themselves, a wheeled device may experience difficulties rolling over the floor. The gaps in the floor are extensive and anything smaller than an inch dropped on the floor is likely to fall through. Some aspects of the construction (e.g., slat to slat attachment) may be challenging to access to disassemble for inspection or repair.”
Fourth Place
Highly Flexible MGAAMA Floor Design by paul.kyum.lee-2
“This is a very well thought out design which uses telescoping beams and flexible top covers. It gives the flexibility of telescoping beams and bearings but minimizes the downside of large gaps with the telescoping beams. It is a very flexible and robust systems because of this. Covers at the ends minimize gaps where small items can be dropped. Only very small gaps exist between slats and as a result it is not as easy for small items to be dropped through the floor. The concept is generally functional, and the covering layer of slats is clearly intended to make the floor more comfortable to traverse than if the crew member were to walk directly on the lower slats. The cover plates at the bulkhead ends also are intended to reduce gaps and discontinuities. This are interesting approaches and are worthy of prototyping and human-in-the-loop testing. Components can be readily machined, or 3D printed. Design was made with this type of fabrication in mind. Many of the parts are able to be made with a CNC with others being off-the-shelf. They are relatively simple structures and should have long-term reliability. Deflection analysis shows that this system will withstand the weight. The individual slats appear to be modular such that any one of them could be taken apart for maintenance or replacement. The one major downside is a lack of verification for roll maneuvers. The paper states it is capable of 20 degrees roll, however there are no illustrations to prove this. It appears that roll will introduce issues with pinch points, lips, and gaps, however there this cannot be said with certainty. Also, the apparent locations of connectors are covered by other material making access difficult. Inspection, disassembly/assembly, and repair may be a time-consuming process.”
Fifth Place
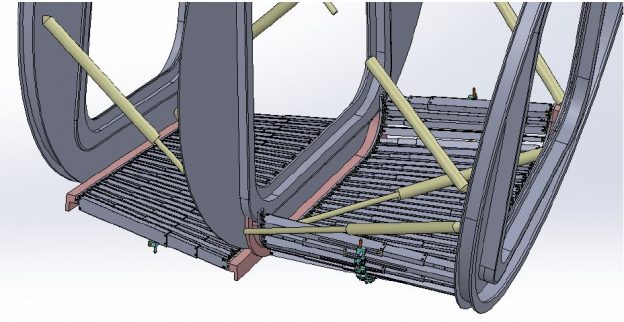
Spacecraft Docking Adapter with a Flexible but Load-Bearing Floor by mhmd.bsl-1

“This design appears to be very flexible and modular, allowing for specific parts to be replaced. It is also lighter in weight than some designs. The floor should be easily traversable by an unsuited crew member. All components are small enough that they can be readily machined, or 3D printed. This design is heavily dependent on the flexibility of the joining plates. If they are strong, flexible, and reliable then this design is very well done. The spacing of the joining plates appear to be well suited for walking maneuvers. While this concept is an intriguing approach to a flexible floor, insufficient detail was given surrounding the compliant floor components. The compliant floor that forms the majority of the flooring surface is not well described. It appears to be designed to offer significant flexibility - using that flexibility to morph its shape as the rest of the floor moves around it. But it does not indicate how robust this material is to damage, how a foot or wheel will move on it, or how it will resist material being trapped in it or falling through it. It is also unclear how this floor can be maintained. This design appears to hold significant promise, but too many design details are glossed over - what is the compliant floor segment made from? Is it a flexible material or is it hinged metal? Do the secondary rails at each end attach to the bulkheads or is there a gap when under pitch? It was stated that it can be made by laser cutting, EDM, or 3D printing, which suggests a possible plastic or metal material. It is not clear how this will hold up over time, how it is installed, or how it could be repaired or replaced. It is also not clear if it will hold up to point loads. This would be problematic on Earth, but even more so in space missions where repair will be more difficult. If these are readily removable / replaceable components it will help significantly. The many gaps in this floor suggest that items will easily be dropped through it to the underside. Having empty space between the joints could cause pinch-points when the floor is flexed in particular directions. Worse, small, or sharp objects may become trapped in the gaps leading to damage of the compliant floor. The concept definitely needs a means to close out these holes. The issues of holes through the floor appear to be an easy problem to fix. A flexible cover across the joints would help this issue. A potentially interesting improvement to this design would be to cover each flexible floor piece with a stretchable substance - like a rubber material, using enough flexible floor pieces that the rubber could stretch and contract within the floor piece's range of motion. This might give a reasonably solid floor and might overcome all of the issues associated with trapping wheels, material falling through gaps, and may even help protect the compliant floor from damage.”
Honorable Mentions
Flexible Flooring Design by adaml-1
“This system is very modular with few simple components, designed with reliability in mind. All components appear relatively easy to manufacture. The joints are common and well known and the slats are large aluminum extrusions providing strength. It uses common off-the-shelf joints and components to make a remarkably simple and robust system. The slats are simple aluminum extrusions which slide onto themselves to provide stretching. They slats are not connected, meaning that each slat and its associated joints can be disconnected for maintenance or replacement. The joints used are common off-the-shelf components which could likely be fabricated. The concept is generally functional, but the relatively large size of the slats (as compared with some other concepts) makes the surface more irregular than it could be with smaller width slats. The resulting irregularities are expected to create a level of mild discomfort and difficulty when using the floor. There are small gaps between slats, and increased gaps at the ball joint interface when in yaw and at either interface when in pitch. The potential exists for sharp edges and pinch points at the bulkhead edges and along the length of the slats, especially when in roll. Some of the bolts appear difficult to access and may require specialized tooling as a function of available clearances. Additionally, the linear bearing rail may be susceptible to dust. In an ideal scenario, this provides an excellent platform for translation. However, when the platform is angled the individual slats create lips which are large enough that they could produce tripping hazards and could inhibit wheeled items from translation across the platform. This most serious issue with this system is the lips that are formed when the platform is angled. If this were to be solved this would be a very reliable and capable system.”
“An overall unique and capable design. It accounts for the lip of the docking hatch and makes it possible to roll items through with small ramps. The tension bridge with slats is flexible and could produce strong and sufficient translations paths. The number of slats can vary depending on application and angles needed for the system. The tension on the wire is adjustable to reduce stress or increase rigidity. Most components will be easy to manufacture. Will not be able to manufacture cables onboard and will have to carry as spares. There may be a concern with the slats slipping and coming closer together, this could produce pinching points. The gaps between slats vary as the MGAAMA articulates in roll, pitch and yaw. This creates potential trip hazards and opportunities for wheels to become stuck. The floor may be traversable by wheeled objects at some MGAAMA orientations but not at others. This may be a source of frustration for the crew. This is exacerbated with reduced visibility when carrying objects and with reduced mobility when in a suit. Safety and usability vary greatly with the quantity of slats and the angles associated with the walkway. With fewer slats and more extreme angles, a 'step' is created at each slat which could be a tripping hazard. A flexible platform on top of the slats could fix this issue. There are multiple small openings throughout the design, through the slats and wire. This could be fixed with a simple flexible cover. Without which, though, gaps in the floor will allow small items to fall through floor or become lodged in the floor. Maintenance and repair of this system looks to be fairly involved. There is a single line supporting all of the slats. If slats were to be added or removed, the entire assembly needs to come apart. There doesn't appear to be much of this system that could be removed in a modular fashion. The stability of the cable-based system is difficult to assess in the information provided. There may be lifetime issues with maintaining tension in cables and they appear difficult to access, especially the middle slats. The crew may be exposed to sharp edges during crew maintenance/inspection or attempts to retrieve fallen/trapped objects. Brackets and slats could be manufactured with CNC machining or 3D printing, however there are components which couldn't. These are the bearings, spring assembly, and the line itself. The line is a critical part of this assembly and cannot be manufactured with these techniques. If the line and bearings are sufficiently strong enough, this could be a long-lasting system. Fatigue on the line itself is the biggest concern. Although a unique concept, the single point failure of the line is hard to look past. This could be redesigned with this in mind to create a more reliable product.”
NASA MGAAMA Adaptive Slat Walkway by nolan.greene-4
“The overall design is simple and effective, inspired by a known technique for platforms that change length. The included analysis shows that this design is strong enough for these applications. All components appear to be easily manufactured with CNC machining and/or 3D printing. It should be straightforward to manufacture a replacement for any component, even in flight. Floor does not have many open spaces for items to fall through. The slats will provide for a smooth, continuous walking or rolling surface and the design appears to be strong and reliable, utilizing a technique already in use. The concept is functional and appears highly reliable, but the design solution selected to accommodate roll, pitch, and yaw is awkward and will create risks for crew injury and loss of items into the region beneath the floor. Any pitch or roll will result in discontinuities between the floor segment and bulkhead, making transit more challenging for any wheeled system and creates a possible trip hazard. The yaw accommodation leads to a very sharp turn at the docking hatch. This will make translation more difficult and may interfere with hatch opening/stowage. The slat system partially limits loss of small items to the volume of the MGAAMA below the floor, but the segments at each end of the walkway both have very large gaps that are pinch points and hazards for getting a foot or wheel caught and where significant objects could be dropped. This is also the worst place for objects to fall due to possible entrapment with the gearing mechanism. And if the roller used to adjust floor length is compromised it could cause damage to the MGAAMA system. If a fallen item were to jam the mechanism it could cause damage the next time the MGAAMA articulates. The inherent design appears to not allow for modular disassembly. The platform arms are interlinked, meaning multiple would have to come off for maintenance. Access to many of the mechanisms will require considerable disassembly time, even for inspection.”
Scissors: design and calculation memory by marcelo.valderrey-1
“This system appears to be readily maintainable. The entire system is designed for long-term reliability and carries significant mass margin that can be used to increase reliability. All parts are small and could be readily fabricated with 3D printing and machining systems carried onboard a large space habitat. Virtually any terrestrial machine shop could do the same. That being said, the rigid peaks in the flooring system associated with the scissor mechanism would be a source of potential discomfort for the crew. While the thicker boots of an EVA suit will largely negate the discomfort of walking on this surface, inevitably shirtsleeve crew will at some point wish to walk on this surface wearing only socks or barefoot, resulting in significant discomfort. Additionally, the surfaces are relatively unforgiving and a fall in the MGAAMA against the floor surface could result in scrapes or minor cuts. And like most concepts there are numerous openings in the floor where small objects can fall through.”
Learn more about our GrabCAD Community Challenges here.